
-
專注環(huán)境試驗設備的研發(fā)與生產(chǎn)
為客戶提供可靠,高性價比定制方案

全國服務熱線:
完成了檢測平臺的定位控制子程序設計和數(shù)據(jù)采集子程序設計后,就可以設計整個檢測平臺的定位控制與數(shù)據(jù)采集程序了,。整個檢測平臺的測量點數(shù)為30個點,,因此需要控制可移動L型皮托管地移動到每個測量點后,,才開始啟動數(shù)據(jù)采集,,當完成把測量數(shù)據(jù)顯示于輸出顯示控件后,再控制移動到下一個測量點和進行數(shù)據(jù)采集,。同時在每次測量開始時,,整個檢測平臺需要進行復位,進行系統(tǒng)復位的方法是在機械原點上安裝定位傳感器,,當可移動L型皮托管接觸到定位傳感器時立即停止,,從而完成整個檢測平臺的機械原點的找正設定,。
在每次測量開始時都需要進行復位操作,以完成檢測平臺工作前的準備工作,。根據(jù)以上整個檢測平臺的編程思路,,對整個檢測平臺的軟件進行了設計。圖5-19是整個檢測平臺軟件的前面板,。檢測平臺軟件的后面板程序由于篇幅比較大,,在本文中略。

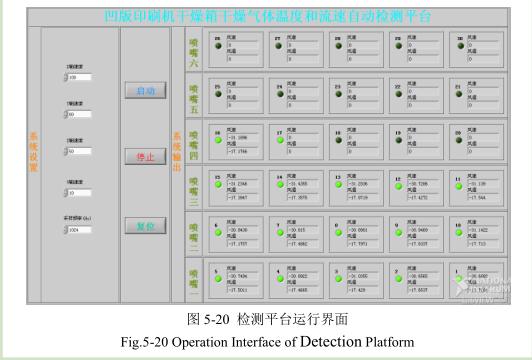
從上面的檢測平臺軟件的前面板可以看出,,檢測平臺軟件的前面板由系統(tǒng)設置部分,、系統(tǒng)操作部分和系統(tǒng)輸出部分構(gòu)成。其中系統(tǒng)設置的參數(shù)包括X,、Y,、Z、U軸速度以及采樣頻率,,這些參數(shù)對于整個檢測平臺的設置是通用的,,因此可以把它們一起放在軟件的前面板來進行設置。系統(tǒng)輸出由6條噴嘴的測量點構(gòu)成,。根據(jù)上文所述的,每條噴嘴均需要測量均距的6個點,,對于測量的每個點,,都有風速和風溫兩個輸出顯示參數(shù)以及一個LED顯示燈。整個檢測平臺系統(tǒng)的具體工作過程是:首先是運行檢測平臺的軟件,,按下復位按鈕,,使檢測平臺系統(tǒng)完成自動復位動作;其次按下啟動按鈕,,檢測平臺系統(tǒng)開始調(diào)用數(shù)據(jù)采集子程序進行個點的數(shù)據(jù)采集,,把采集到的數(shù)據(jù)進行處理并顯示于前面板上,同時點亮個LED顯示燈,,表示個點數(shù)據(jù)測量完成,。
然后,檢測平臺程序調(diào)用定位控制子程序,,控制可移動L行皮托管移動到第二個測量點,,當定位任務完成后,檢測平臺系統(tǒng)再調(diào)用數(shù)據(jù)采集子程序進行該點的風速和風溫的數(shù)據(jù)采集,、處理和顯示,,直到該點的測量數(shù)據(jù)完成后,再同理移動到下一個相鄰的測量點,,進行新一輪的數(shù)據(jù)測量,;整個檢測平臺就這樣如此一直測量下去,,直到測量到噴嘴六的最后一個測量點,即第三十個測量點,,從而完成整個檢測平臺的一次數(shù)據(jù)測量任務,。圖5-20給出了整個檢測平臺軟件運行工作過程中的界面。
對于整個檢測平臺軟件的后面板程序,,用于完成對每個測量點進行運動定位控制和數(shù)據(jù)采集任務的LabVIEW程序控制結(jié)構(gòu)是順序控制結(jié)構(gòu),,即是通過順序結(jié)構(gòu)里的每個幀用于控制完成每個測量點的定位控制和數(shù)據(jù)采集任務,同時在每個幀里,,均加入一個嵌套的順序控制結(jié)構(gòu),,以先后完成系統(tǒng)定位和數(shù)據(jù)采集的要求。因此,,對于其他具有不同噴嘴或者需要測量不同點數(shù)的干燥箱,,只需要相應重設系統(tǒng)的運動控制參數(shù)和數(shù)據(jù)采集參數(shù)以及增加或者減少用于控制測量點的幀即可。不過由于時間有限,,現(xiàn)在已完成的檢測平臺系統(tǒng)軟件僅可以滿足實現(xiàn)每個測量點的風速和風溫測量的功能,,還存在系統(tǒng)設置參數(shù)比較簡單和單調(diào),沒有充分考慮到檢測平臺軟件程序的容錯處理以及增加一些必要的檢測平臺通用輸入輸出功能等不足和缺陷,,因而在整個檢測平臺軟件程序的改進和完善上還有很多后續(xù)的工作需要做,。
綜上所述,采用阿爾泰USB1020運動控制卡和PCI8757數(shù)據(jù)采集卡,,完全符合整個檢測平臺系統(tǒng)的功能要求和滿足對系統(tǒng)軟件開發(fā)的兼容性,,因而為無縫地完成整個檢測平臺系統(tǒng)的定位控制和數(shù)據(jù)采集工作提供了硬件的基礎(chǔ)保證;采用NI的LabVIEW軟件對檢測平臺系統(tǒng)的軟件進行開發(fā),,則具有簡單易學,、開發(fā)周期短、開發(fā)效率高,、人機交互界面好,、軟件系統(tǒng)維護方便等特點,因而為檢測平臺系統(tǒng)的軟件開發(fā)提供了重要保證,。
http://ywxsfz.com.cn

公司地址:廣東省東莞市寮步鎮(zhèn)嶺安街2號
